Design and Development of a Computer Vision based Navigation Assistance for Visually Impaired Persons in Indoor Environments
From January 2016 to June 2017
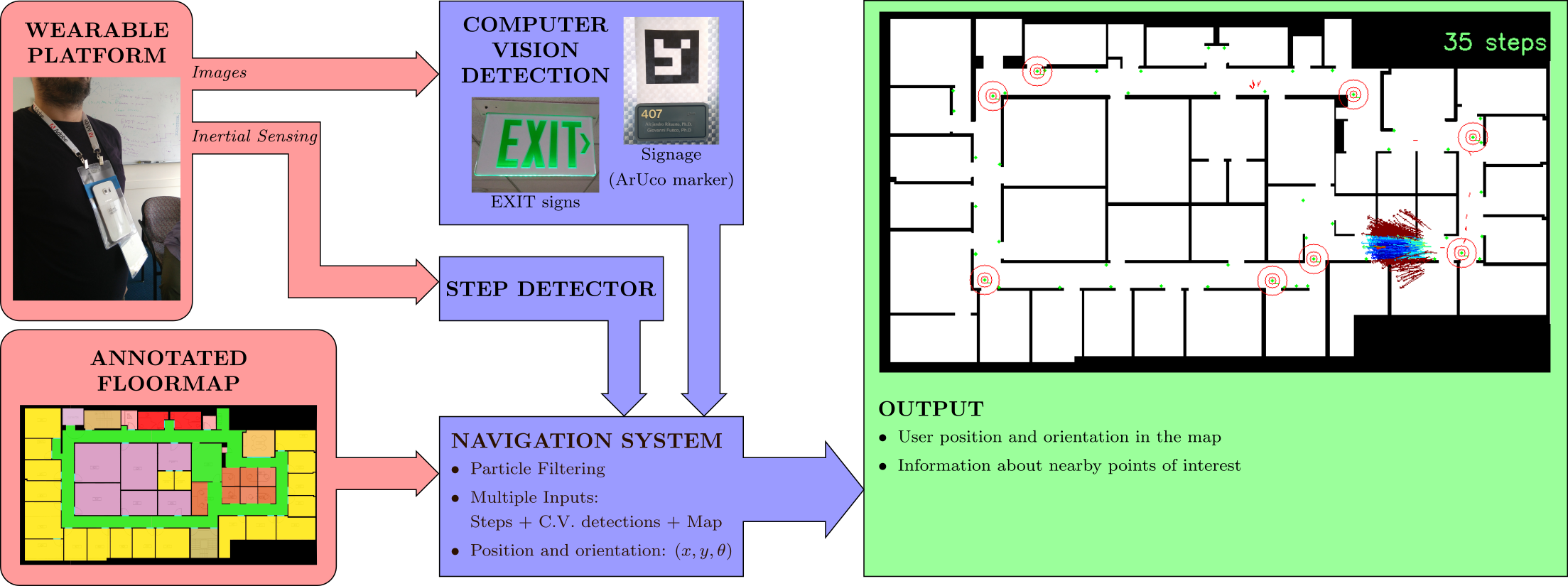
The ability to navigate safely and confidently is a fundamental requirement for independent travel and access to many settings such as work, school, shopping, transit and healthcare. Navigation is particularly challenging for people with visual impairments, who have limited ability to see signs, landmarks or maps posted in the environment. While a variety of GPS-based wayfinding aids are available for this population, the lack of GPS access indoors has meant that very few alternative sources of wayfinding information are available in this setting. We propose to create an indoor navigation assistance system that uses computer vision to localize and guide the user in a map. Our system will use a smartphone as sensor and user interface platform and a camera as main sensor. We are going to benefit from the use of non-conventional vision systems such as omnidirectional cameras or RGB-D sensors for mapping and localization. We will also research the best system configuration (sensor position, user interface and localization precision) by testing with real users.
Collaborators:
James Coughlan, Giovanni Fusco